I apologize for the long gap between posts; most of my work has been proprietary recently, so there's not too much to share on the blog.
Therefore, I'm presenting a personal project: a retrofit of a late-1960s era cabinet record player. It's a Fleetwood model 4057, made in Montreal, serial 283. It came complete with AM and shortwave radio, record player and tape input, powered by a tube amp rated for 117 V, 0.95 A at the input. I believe these units were retailed by Sears. The guts were all removed and replaced by a modern turntable, digital music player, amplifier and controller.

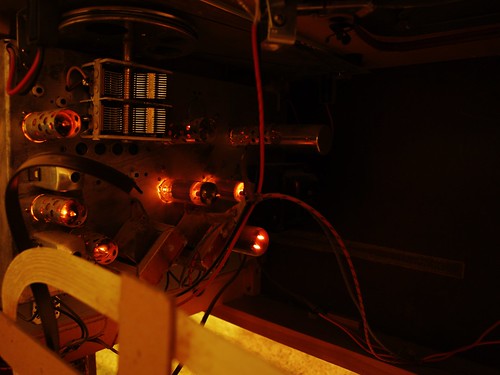
Before the retrofit, the unit lights and tubes lit up. On radio, it crackled when you adjusted the volume but couldn't be tuned to any station. The record player wouldn't rotate and no sound was produced when the record was turned by hand. So the radio/amp was removed and sent to the tube amp hospital and the record player went to the morgue.
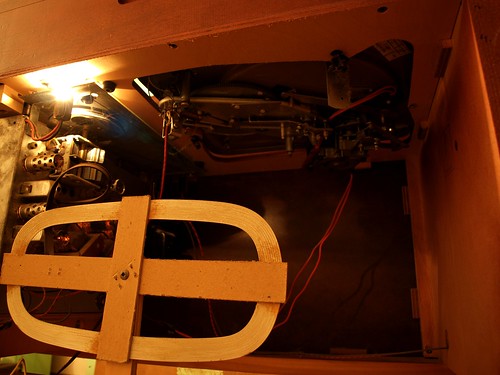

The first step in the retrofit was to replace the record player shelf as it had a large cutout for the sunken turntable. I took this opportunity to add some vibration isolation. I expected structural feedback to be a significant problem because the speakers and turntable are mounted in the same unit, as opposed to satellite speakers. Thus, the turntable shelf was designed to be a massive vibration isolator. The shelf is constructed of a wood frame with hardboard top and bottom panels, filled with sand.


The turntable was replaced with a Stanton T.80 turntable, capable of digital S/PDIF output.

Next: digital music. Digital music is played by a VIA Epia M10000 mainboard. This is a small form-factor (Mini-ITX) low-power computer. It's a bit underpowered for video, but is perfect for a mp3 and internet radio player. I've installed Ubuntu server and use VLC as a media player, controlled either over SSH or with its web interface.

The amplifier is an older Sony, purchased second hand for cheap. It sits in the centre cabinet. The computer provides one analog input and the turntable provides a digital input. The integrated speakers mean that the speaker cables need not be flexible after installation, so I used solid 12-gauge residential electrical cable ($1/foot at Rona for essentially no resistance and no chance of phase distortion from complex impedance). The original speakers (12-inch woofer and tweeter) haven't been replaced yet (and may not be).


Since the amp is mounted in the belly of the cabinet, the remote no longer works. I worked around this by using a microcontroller to relay the IR remote signals. There is an IR sensor behind the cloth of the right speaker, which is processed by an ATMEGA168 microcontroller. Signals destined for the amplifier (Master Volume, etc) are repeated on an IR LED temporarily taped to the amplifer's remote input. Signals that target the digital music player (track forward, etc) will be passed to the computer over USB (this functionality is not done yet). The USB link will also allow one to control the amplifier over the network. A preamp and mixer will use digital pots driven by the microcontroller to adjust the relative levels and tone of the turntable, digital music player and an aux input. This function is not yet operational, but I can dim three leds using the remote. All of this is being prototyped on an Arduino board since it has USB connectivity and there is a
nice library of IR remote functions (written by Ken Shirriff).

So how does it sound? I haven't done any acoustic analysis yet and I hate audiophile-style subjective reviews, but, to my ears, it sounds really good, especially considering the vintage speakers. There is no discernible distortion at normal listening levels (as long as I remember to set the soundcard gains to avoid digital clipping).
Unfortunately, my massive sound isolator is not super effective. At high gains there is a 94.1 Hz feedback that can be eliminated if I put all my weight on the cabinet. This frequency corresponds to a 10.6 ms delay (assuming there is no signal phase changes) which at a sonic speed through wood of 3300 m/s would require a signal path of 35 m, clearly much longer than the size of the console. This leads me to believe there is a significant delay in the turntable's analog to digital conversion process. Perhaps switching to the analog output (with presumably no delay) will solve this problem, although it may just move it to a higher frequency. Alternately, the solution may be to reduce the coupling between the cabinet and the turntable shelf. The shelf is a relatively tight fit so the effective spring between the console and the shelf is relatively stiff. I plan to modify the shelf mounting so that it has no solid contact with the cabinet, being suspended on acoustic foam or a semi-liquid like acoustic caulk or Blutack.

Next: performance characterization and speaker optimization.
Edit 20/09/2009: I almost forgot to mention that I plan to host a session on microcontrollers at
Bar Camp Saskatoon.












































